![]()
Two-Link Robotic Manipulator Control
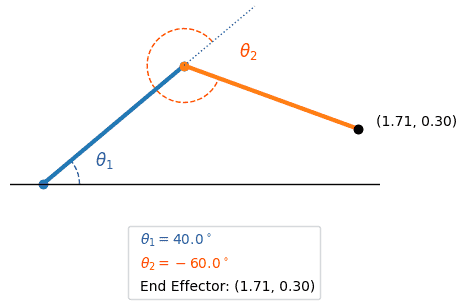
To control a 2R robotic arm, we derive forward and inverse kinematics, energies, and apply the Euler-Lagrangian equation for joint torques.
Loading posts...
Like my work? Arrange a meeting with me at my office, I'll be happy to work with you!
[email protected]
Like our work? Arrange a meeting with us at our office, We'll be happy to work with you!
We are always looking for new talents and we were expecting you. Time to apply, buddy!
To control a 2R robotic arm, we derive forward and inverse kinematics, energies, and apply the Euler-Lagrangian equation for joint torques.